Home
Fundamentals
Week 1
Week 2
- Overview
- Q1 - Integer Distance
- Q2 - Largest Double
- Q3 - Evaluating Boolean Values
- Q4 - Face-Printing

- Q5 - Quadratic Equations
- Q6 - Polar Coordinates
- Q7 - Safer Fixed Divider
- Q8 - Safer Quadratic Solver
- Q9 - Squares Loop
- Q10 - Lopsided Number Triangle
- Q11 - Gambler's Ruin
- Q12 - Quadratic Solver With Imaginary Parts
Week 3
- Overview
- Q1 - Floating point division
- Q2 - While loop example - arithmetic series
- Q3 - ArrayRotate
- Q4 - Mean and Variance
- Q5 - Median Temperature
- Q6 - Mode
- Q7 - Sieve of Eratosthenes
Week 4
- Overview
- Q1 - Array Front
- Q2 - Date Fashion
- Q3 - IsTriangular
- Q4 - NMax
- Q5 - CoordinateConverter
- Q6 - ArrayOps
- Q7 - Error Handling
- Q8 - One Time Pad
- Q9 - Factorial Recursion
Week 5
- Overview
- Q1 - No Triples
- Q2 - Has 271
- Q3 - Nesting Nightmare
- Q4 - N-by-N Matrix
- Q5 - Path Names
- Q6 - Voronoi Diagram
Week 6
- Overview
- Q1 - Daleks
- Q2 - Arrays and Reference Types
- Q3 - Make your Own CreditCard
- Q4 - DNA Strand
- Q5 - Vector3D
- Q6 - Image Editor
Week 7
- Overview
- Q1 - Daleks Again
- Q2 - Arrays and Reference Types
- Q3 - Reading in files
- Q4 - Interval
- Q5 - Shapes
- Q6 - Text Analysis
- Q7 - Noughts-And-Crosses
Week 9
Week 10
Advanced
Java Class Design
Advanced Class Design
Object-Oriented Design Principles
Generics and Collections
String Processing
Exceptions and Assertions
Java I/O Fundamentals
Java File I/O (NIO.2)
Databases with JDBC
Threads
Concurrency
Localization
Android Development
Resources
Java Files

This exercise is reserved for pair programming in the live lab sessions.
Please skip it when doing the exercises individually.
In this exercise, we will create a class that represents a vector in 3D space. Such a class would be crucial in applications such as a 3D game-engine.
In previous exercises, we have considered the representation of vectors in a 2D space. We now extend this to 3D space. We previously specified the points in Cartesian coordinates, and wrote static methods for converting them into polar coordinates. In the exercise, we will do the same, except that we will extend our Cartesian coordinates from \( (x,y) \) to \( (x, y, z) \), and instead of using polar coordinates \( (r, \theta) \), we will use spherical coordinates \( (r, \theta, \phi) \). Given a point in 3D space specified by such coordinates, \( r \) is the radial distance of that point from a fixed origin, \( \theta \) is its inclination angle measured from a fixed zenith direction, and \( \phi \) is the azimuth angle of its orthogonal projection on a reference plane that passes through the origin and is orthogonal to the zenith.
Here’s a useful illustration from Wikipedia:
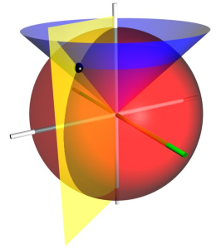
Illustration of spherical coordinates. The red sphere shows the points with \( r = 2 \), the blue cone shows the points with inclination (or elevation) \( \theta = 45\deg \), and the yellow half-plane shows the points with azimuth \( \phi = -60\deg \). The zenith direction is vertical, and the zero-azimuth axis is highlighted in green. The spherical coordinates \( (2, 45\deg, -60\deg) \) determine the point of space where those three surfaces intersect, shown as a black sphere.
Note
The denotation of \( \theta \) in spherical coordinates is different from that in previous exercises.
We will use the following definitions for converting between coordinate systems:
\[ \theta = \cos^{-1} \left( \frac{z}{r} \right)\\ \phi = \tan^{-1} \left( \frac{y}{x} \right)\\ r = \sqrt{ x^2 + y^2 + z^2 } \]and conversely:
\[ \begin{split}x &= r \times \sin \theta \times \cos \phi\end{split}\\ \begin{split}y &= r \times \sin \theta \times \sin \phi\end{split}\\ \begin{split}z &= r \times \cos \theta\end{split} \]Here is the API for the class Vector3D:
- public Vector3D(double x, double y, double z)
- Class constructor
- public double getR()
- Return the radial distance \( r \).
- public double getTheta()
- Return the inclination \( \theta \).
- public double getPhi()
- Return the azimuth \( \phi \).
- public static Vector3D add(Vector3D lhs, Vector3D rhs)
- Return the sum of two 3D vectors.
- public static Vector3D subtract(Vector3D lhs, Vector3D rhs)
- Return the difference of two 3D vectors.
- public static Vector3D scale( Vector3D v, double scaleFactor)
- Return the result of scaling v by scalefactor.
Write a Vector3D class which meets this API.
Hint: for Vector3D.getTheta() there are two arctan methods available in the java.lang.Math class - make sure you choose the appropriate one.
An automated test has been created for this exercise: Vector3DTest.java.