|
Note that the first session is in week 2. All sessions (TBC) are Tuesdays 4-6pm in 3.01 AT.
Lecturer: Barbara
Webb
This page describes the assignments and deadlines for the IAR course. More information, such as how to use the robots, answers to questions arising etc. can be found at the IAR practicals wiki
Demonstrator: Your first contact for problems with the practicals is Jane Loveless, email: s0937976@sms.ed.ac.uk
| Week 3 | Task 1: Robot explores reactively. | First report due Thursday 12th October | Demo due at practical week 4 |
| Week 5 | Task 2: Robot can get home. | Second report due Thursday 26th October | Demo due at practical week 6 |
| Week 8-9 | Task 3: Robot can track its own location in a map. | Final Report due Thursday 24th November | Final competition at practical week 9 |
You should submit just one joint report per group. If there is any reason you do not think the marks for the report should be distributed evenly amongst the group members, please put a note on the report stating what percentage split you have agreed. Please also make sure that the front page of your report has your names and student numbers on it.
Submission should be an electronic document in pdf format, submitted via the on-line submit system by 4pm:
submit iar cw1 Your_surnames_report1.pdf(For later reports replace "1" with 2 or 3 as appropriate)
The first two tasks are assessed, but worth fewer marks (2% for the demo, 8% for the report), as their purpose to make sure you are making steady progress at the start of semester, and to give you feedback as you go on how to write a good report. But note, the demo is required; reports will not be marked unless we have actually seen your robot attempt the task during the designated practical session. As detailed below, you will get back your marked report with written comments at the practical following your submission, and will have the opportunity to discuss it at that time with the marker to clarify any issues. You will also get formative feedback from the tutor at the practicals preceding submission and from the demo about your approach to solving the task and whether this will meet the assignment criteria.
Further guidance on report writing here
Good scholarly practice: please remember the University requirement that material submitted for assessment is entirely the student's own work. Details about this can be found here.
Your robot should reactively explore the arena. This includes moving around without hitting obstacles or getting stuck in corners or dead-ends. Note the distribution of obstacles in the arena can be altered at any time.
In implementing this task you should particularly explore different ways of using the eight IR sensors: for example, using one pair of IR for avoiding obstacles; or combining all the readings to try to identify the shape around the robot before deciding how to act. You should also explore whether particular ways of moving are more or less effective: for example on-the-spot turns vs. curved paths. In your report you could discuss whether you think a change in the physical design of the robot could have made the task easier. Note also that as sensors and motors are not precise, you might want to establish a calibration procedure
Demonstration (2 marks) due at practical week 4.
Report (8 marks) on Thursday week 4 (12th October) at 4pm.
Submission should be an electronic document
in pdf format, submitted via the on-line submit system by 4pm:
submit iar cw1 Your_surnames_report1.pdfMarked reports will be returned at the practical in week 5.
The aim of this task is for your robot to be exploring the arena and then, on a signal, be able to return to the point it started from (within 10 cm).
You can use whatever method you like but a possible method would be to implement basic odometry using the wheel encoders on your robot (see IVR practical 5). As before, you might find that particular movement patterns lead to more or less reliable odometry. Note, also, that a 'straight return' journey might include obstacles so your robot should be able to deal with this.
Demonstration (2 marks) due at practical week 6.
Report (8 marks) on Thursday week 6 (26th October) at 4pm.
Submission should be an electronic document
in pdf format, submitted via the on-line submit system by 4pm:
submit iar cw2 Your_surnames_report2.pdfMarked reports will be returned at the practical in week 7.
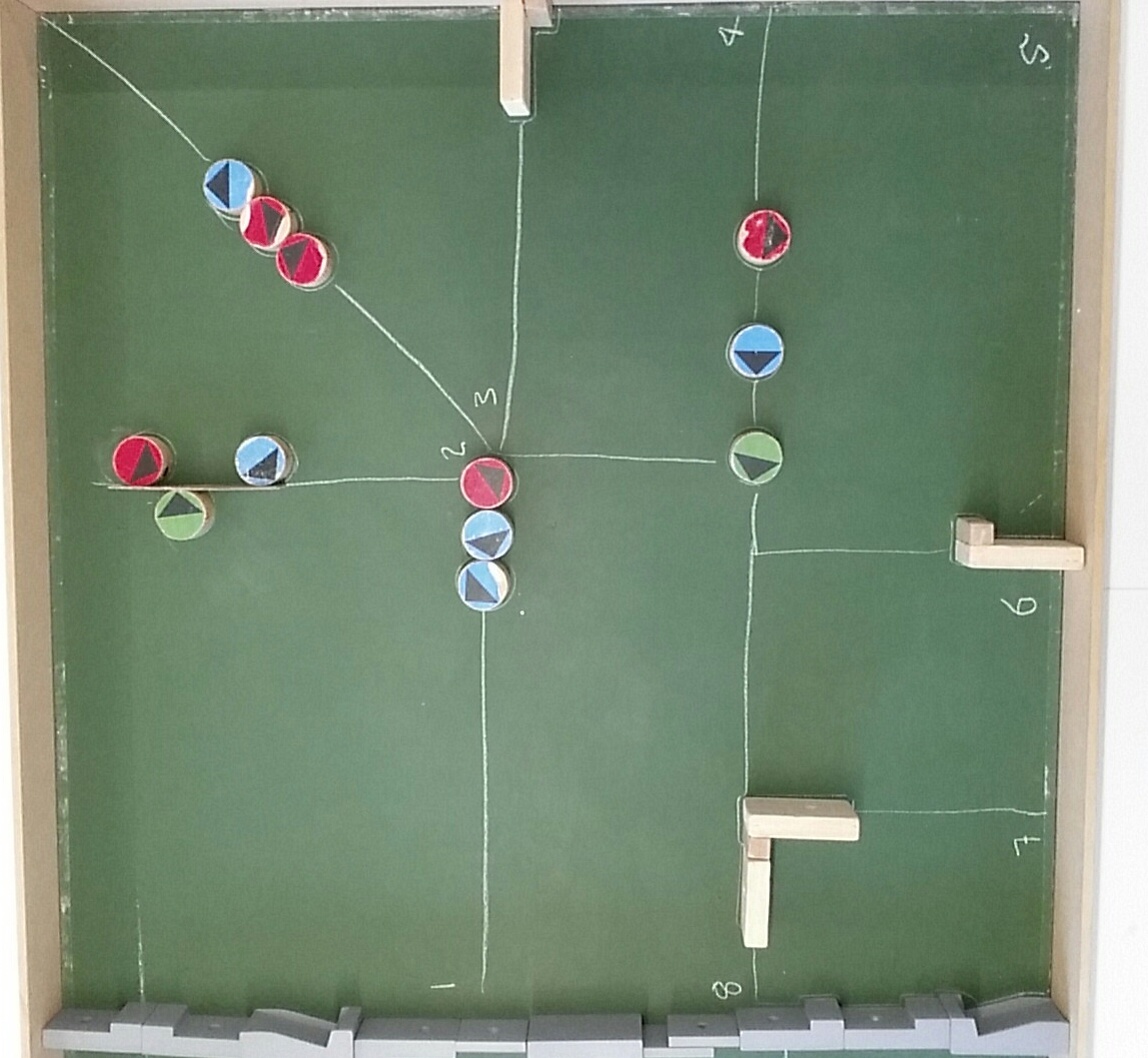
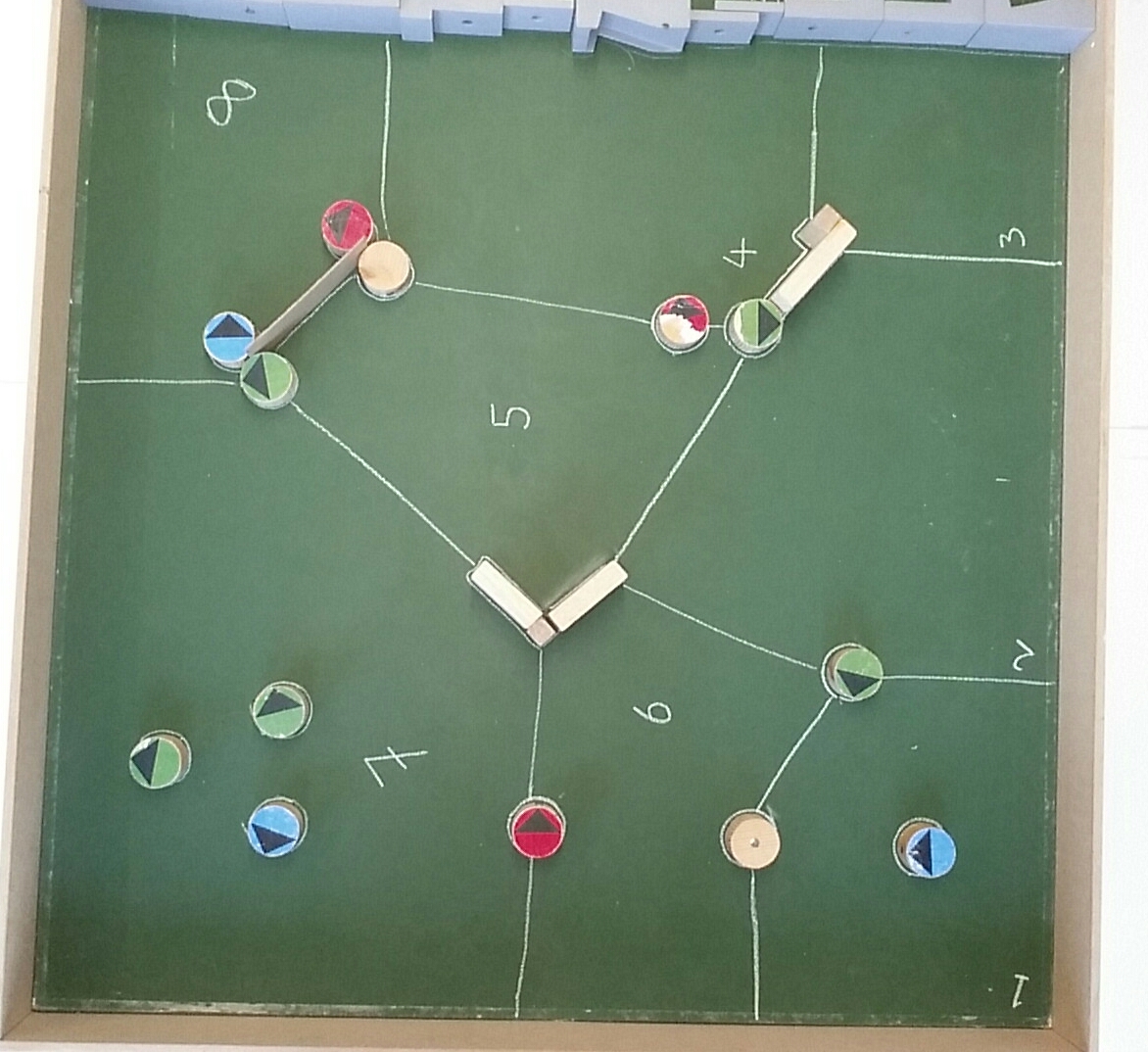
For this task, the arena obstacle layout will be fixed, and all obstacles made from the same material. The arena will be divided into eight zones. You will be give an overhead picture of the layout to use as the basis for a map. The robot should be able to explore and provide a continuously updated estimate of its own location, displayed in a map on the computer screen. You can use any method but we suggest using a particle filter to combine odometry and inputs from the IR sensors might be a viable solution.
For the competition, you will be given (on the day) a list of the order in which you should visit the zones. The winner will be the robot that visits the most zones, in the order on the list, without getting lost, in five minutes (if more than one robot visits all the zones in 5 minutes, the one that did so fastest will win).
Competition at practical week 9. Note this is more than a week earlier than the due date of the report so that you have time to gather data on your robot's performance after the competition.
Final Report (30 marks) on Thursday week 10 (24th November) at 4pm.
Submission should be an electronic document
in pdf format, submitted via the on-line submit system by 4pm:
submit iar cw3 Your_surnames_report3.pdfMarked reports will be returned via the ITO by week 12.
Last update: August 28, 2017.
|
Informatics Forum, 10 Crichton Street, Edinburgh, EH8 9AB, Scotland, UK
Tel: +44 131 651 5661, Fax: +44 131 651 1426, E-mail: school-office@inf.ed.ac.uk Please contact our webadmin with any comments or corrections. Logging and Cookies Unless explicitly stated otherwise, all material is copyright © The University of Edinburgh |

